
前言
目前自动驾驶系统整体处于蓬勃生长状态,从新势力造车到传统车企,配备不同级别的自动驾驶系统车辆道路演示层出不穷。自动驾驶领域日新月异的发展也带来不少挑战和问题,比如缺乏具有明确性和实施性的评价指标对自动驾驶系统性能进行测试评判。
MXeval软件是便捷的自动驾驶性能和车辆动力学评估软件,该软件融合了国际标准化组织制定的标准(如ISO 11270:2014)、欧洲经济委员会汽车法规(如UN ECE R79)和大量客户实施多年研究积累知识经验形成的测试场景库,以乘客主观体验为最小单元,将主观感受转换为客观的KPI性能指标,通过KPI指标来客观衡量车辆自动驾驶系统或车辆动力学性能。以KPI指标为基准,针对性调整车辆自动驾驶系统或车辆动力学参数,来优化车辆系统性能。

MXeval 4.0版本软件在原有软件的基础上,紧跟自动驾驶领域潮流,以客户实际使用需求为导向,新增测试场景库,定制化KPI关键性指标和报告等特性,将软件推向了一个新的维度。
增加稳定控制场景库
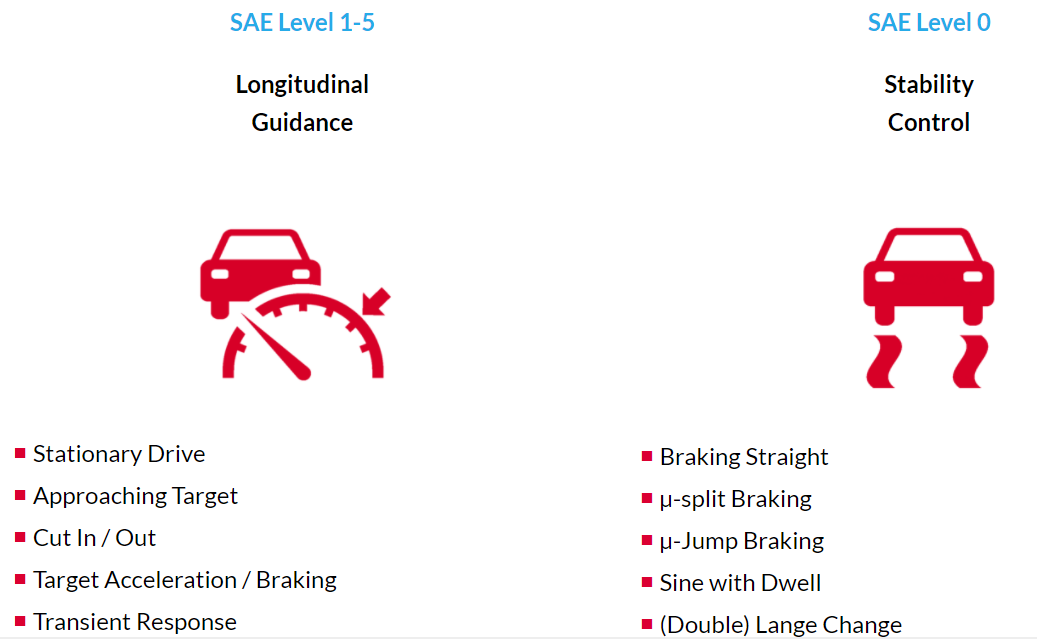
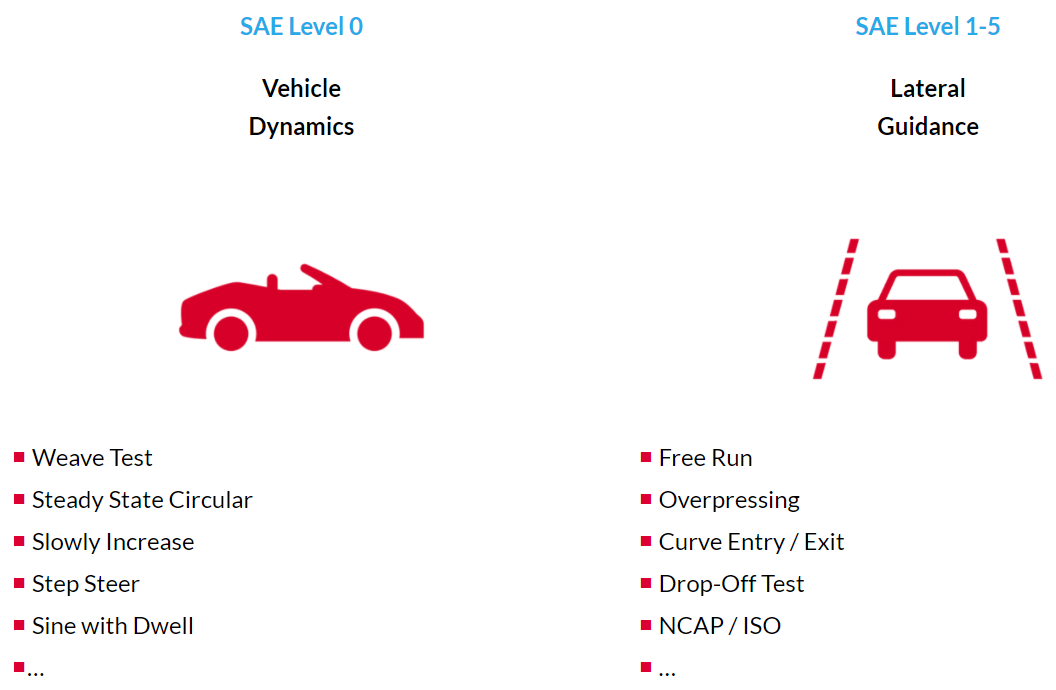
MXeval4.0在横向LKAS、纵向ACC和车辆动力学场景库的基础上,新增Stability Control场景库,用来测试和评估车辆制动和动态稳定控制性能。µ-Jump Braking用来测试车辆在不同道路摩擦系数下的制动性能;µ-Split Braking用来测试车辆制动踏板在最大开度下的制动性能,该KPI评估方法覆盖了ISO14512:1999标准;Sine With Dwell依据 UNECE R140法规,用来测试车辆在高速(80kph)行驶时电子稳定控制系统的性能;Lane Change双移线变道工况基于ISO 3888标准提取关键性能指标用来测试车辆操控稳定性。
MXeval软件不仅具象化了法规和标准中的测试场景规范,还将规范中测试描述落地为易于实施的测试方法,为不同阶段的车辆测试试验提供指导。工程师根据MXeval软件中对具体测试场景和测试步骤的描述,执行车辆运动策略,采集测试场景规定的数据,得到离线数据导入软件之后根据生成的客观KPI指标即可分析车辆在该场景下的性能表现。
自定义测试场景
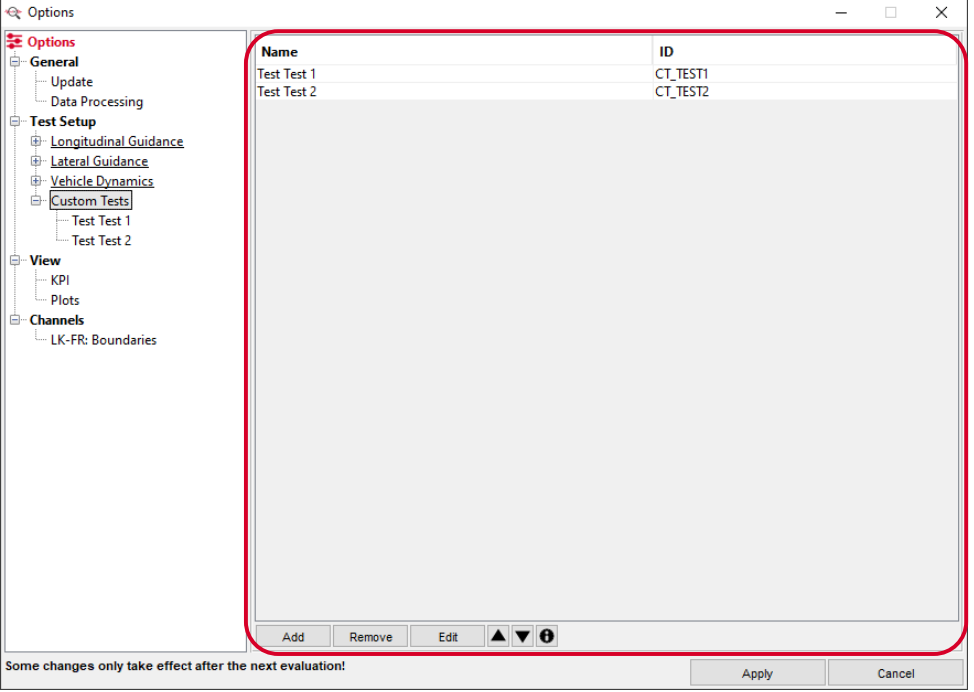
除了软件自带测试场景外,MXeval4.0还支持添加自定义测试场景。方便工程师根据实际工作需要,在软件中设计特定的测试场景、目标信号和关键性能指标,得到目标测试数据之后导入软件后进行客观评估。软件自定义测试场景操作简单明了,在现有测试场景库的框架下,点击几下鼠标添加测试,即可集成到软件内部进行客观评估。
自定义报告模板
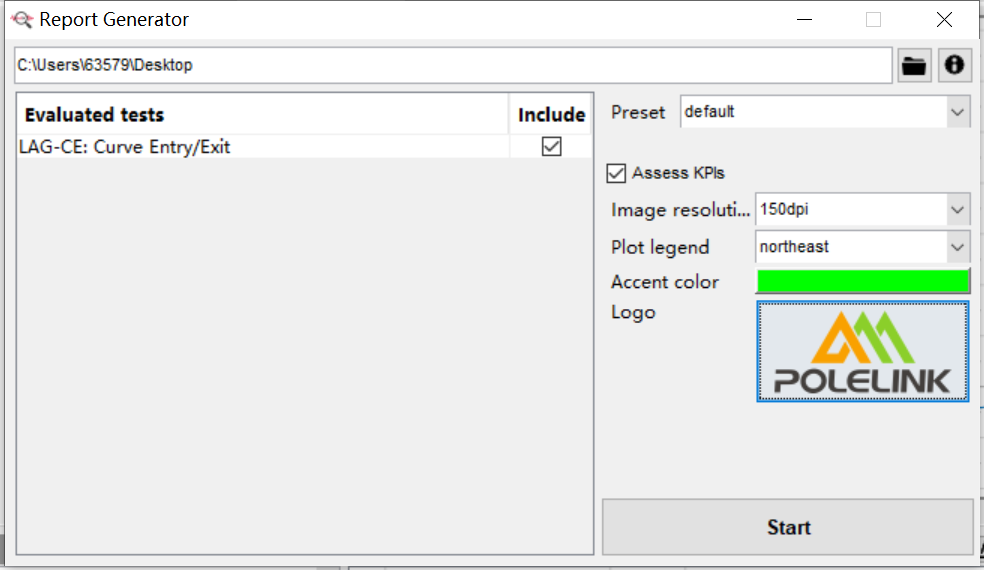
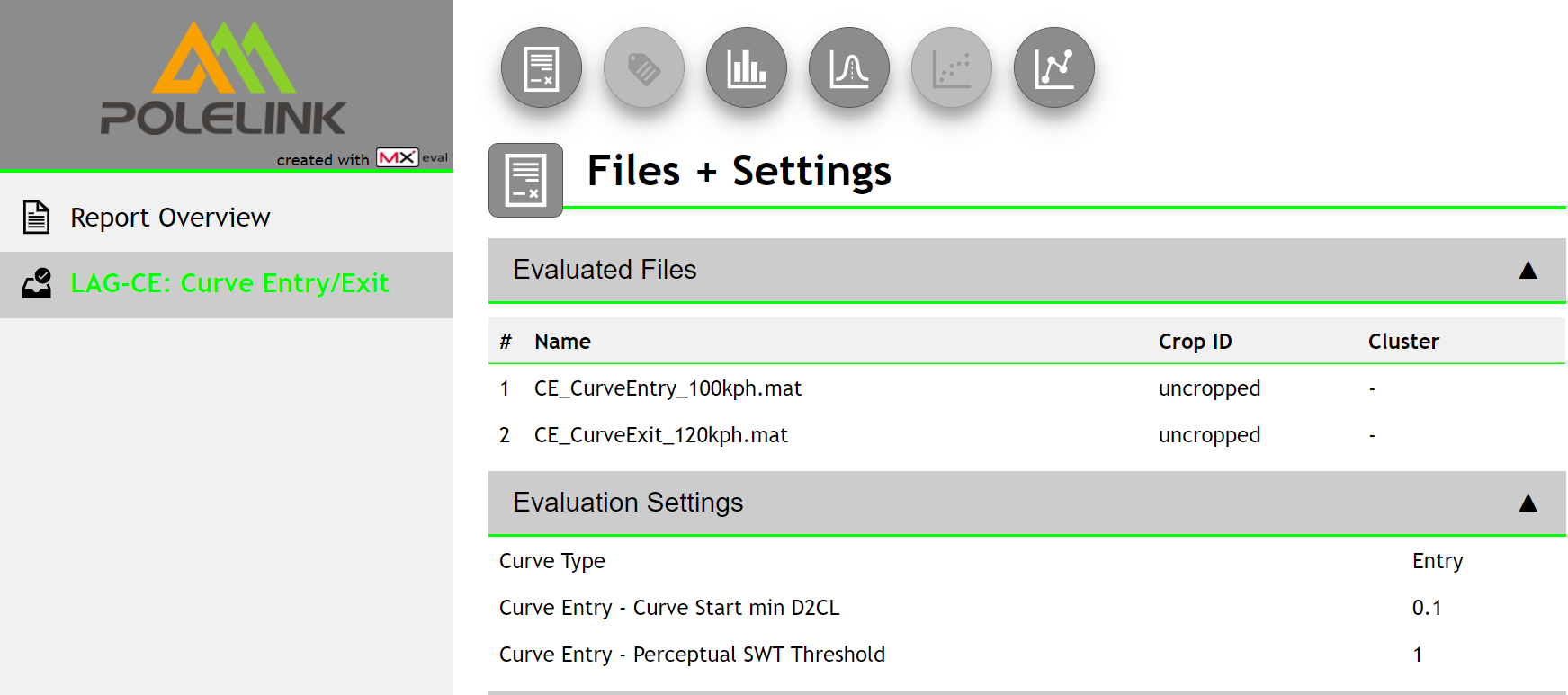
对于分析结果,MXeval软件提供标准规范的html格式报告,报告详尽的包含了报告生成日期、创建报告人员、使用软件版本、测试场景名称、评估数据文件名称和类型 、评估设置,信号配置和客观性能指标参数的信息。MXeval4.0版本软件中,可以定制报告模板,配置报告中显示公司标志和分割线颜色,丰富了报告的独特性和可读性。
子图可视化
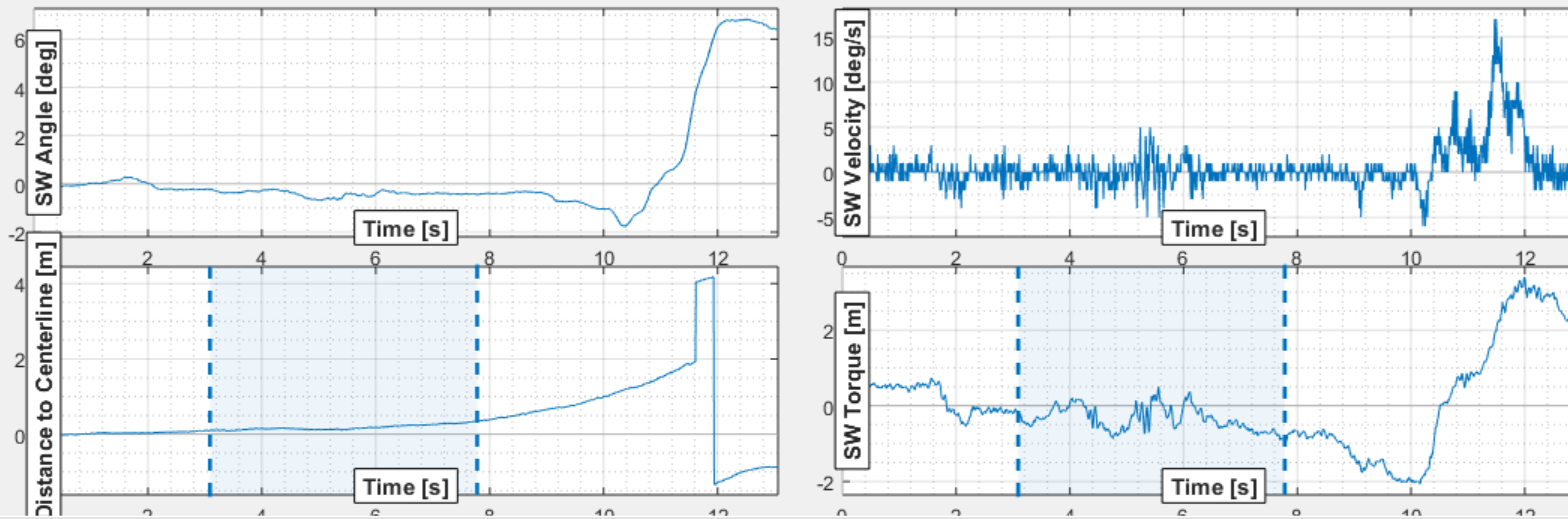
在分析客观性能指标时,图形化的数据能直观地反应数据变化规律。当两个或者多个性能指标参数需要对比时,在多个界面来回切换视图,不仅会降低工作效率,还可能因为图像间接对比影响分析准确度。MXeval4.0软件新增多个子图分析,可以在一个界面中并排分析多个指标视图,从而对评估结果提供更准确的反馈。
热力图可视化
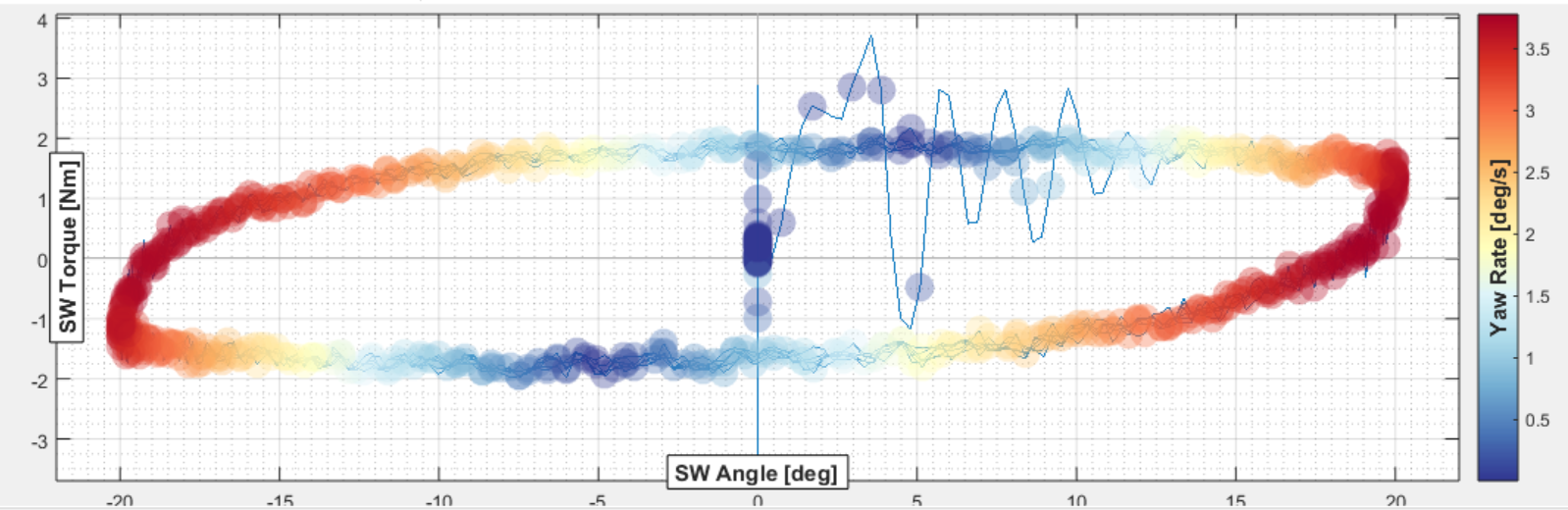
在分析客观性能指标过程中,会遇到三个信号的情况,这些信号之间不是简单的线性或者非线性关系,无法利用二维坐标进行直观化分析。MXeval4.0软件提供三维热力图,以某个信号为横轴,另一个信号为纵轴,其他信号以不同颜色的热力图形式显示,方便分析信号数据之间的关联性。
总结
MXeval4.0不断完善软件功能丰富测试场景库,提供自定义测试和定制化报告,为用户提供称心应手的自动驾驶和车辆动力学性能测试分析工具。
北汇信息作为MdynamiX公司合作伙伴,携手MdynamiX一起将国际自动驾驶和动力学性能评估测试的方法和经验分享给国内汽车行业,助力中国客户在自动驾驶和车辆动力学领域的发展。
![]()
![]()
![]()
![]()
![]()
版权 © 2022 上海北汇信息科技有限公司 沪ICP备14018904号-1
