
智能驾驶测试解决方案
智能网联汽车集中运用了计算机、现代传感器、信息融合、模式识别、通信网络及自动控制等技术,是一个集环境感知、规划决策和多等级自动驾驶控制于一体的技术综合体。
为此在智能网联汽车研发过程中测试和验证面临巨大的挑战。一方面,需要新的测试方法以改进传统路测方法,解决传统测试中需要大量行驶里程所带来的一些问题。另一方
面,由于发展初期有限的市场渗透率,测试验证过程还需考虑混合交通环境下其他交通参与者的驾驶行为对自动驾驶汽车功能产生的重大影响。
北汇信息与国内外知名企业合作,为中国汽车客户提供智能驾驶相关测试系统及服务,主要包括L1-L5自动驾驶控制系统的MiL/HiL/ViL测试系统,自动驾驶数采和实车功能测
试,毫米波雷达测试及仿真系统等,全面助力智能网联汽车的研发测试与生产。
概述
随着技术的发展,汽车量产搭载的自动驾驶技术已经由初级的L1/L2辅助驾驶,向L3甚至更高级别演进。高级别的自动驾驶技术依赖更多传感器,那么在环境感知、多传感器融
合、决策规划、车辆控制执行、功能安全等方面测试的挑战将日益增大。
北汇信息作为国内一流测试方案服务商,为各主机厂、控制系统/传感器供应商在研发的各阶段提供解决方案。
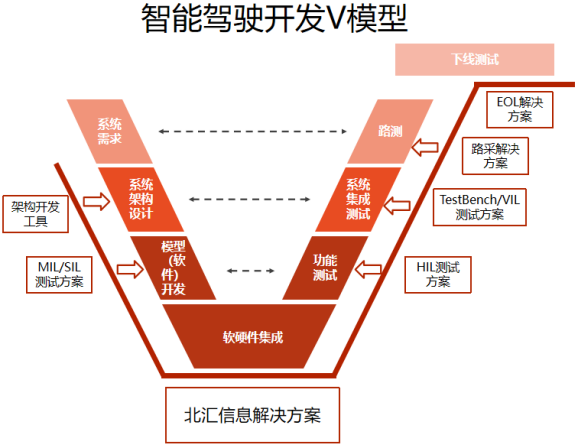
智能驾驶仿真测试:MiL/SiL/HiL/ViL
美国兰德公司研究表明,自动驾驶需要行驶数亿、甚至数千亿英里验证其可靠性,实车驾驶需要行驶数十年、甚至数百年才能完成可靠性验证。同时美国N-FOT项目研究表明
“完成一次公共道路测试的成本至少在100万美元以上”。
基于时间和成本的综合考量,我们可以通过虚拟仿真技术,对道路环境、交通、感知系统、决策规划系统和执行系统进行仿真建模,在实验室环境下实现智能驾驶系统的虚拟
仿真测试,加速智能驾驶研发。
智能驾驶仿真测试与传统仿真测试相比,对车辆动力学仿真精度要求更高,更关注车与环境的交互, 更重视测试场景的分析和测试场景数据库的建设。
智能驾驶MiL/SiL解决方案
MiL/SiL测试主要测试算法模型的功能逻辑。北汇信息基于行业主流的虚拟仿真软件(如Hexagon公司的VTD、Vector公司的DYNA4和CANoe等)和自动化测试工具
(如Synopsys公司的TPT、Vector公司的vTESTstudio),提供完整智能驾驶MiL/SiL解决方案,覆盖AEB、LDW、TSR、HMA、LCDA、LKA、IACC、TJP、TJA、APA等决
策规划控制算法MiL/SiL测试,同时也能覆盖传感融合算法MiL/SiL测试。
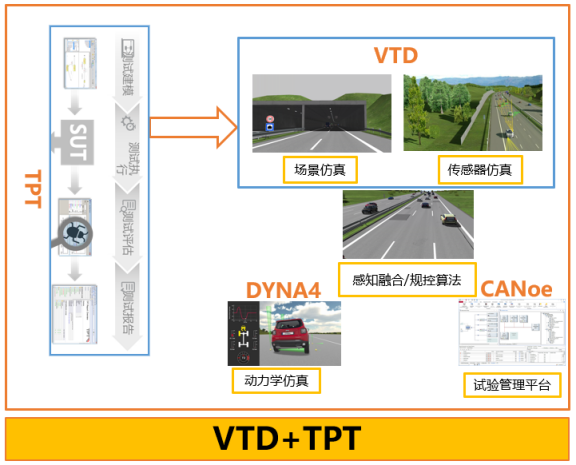
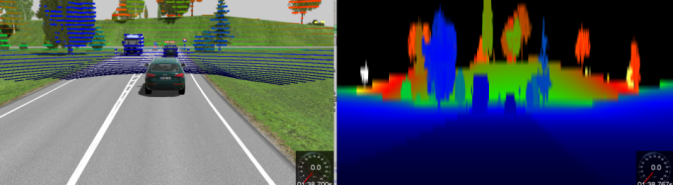
VTD作为商用专业的虚拟场景仿真软件,能实现逼真场景渲染、高精度传感器模型和周围交通流的仿真,结合Vector主流的DYNA4动力学软件和CANoe试验管理软件,完成
智驾MiL/SiL所需的动力学闭环及各种模型/中间件接口适配。使得测试部署在高性能实时环境下,保证了测试过程数据交互具有良好的一致性和实时性。

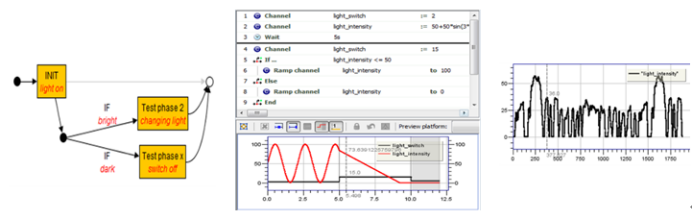
TPT提供了一套高效的测试建模方法,可以控制多种虚拟场景元素的参数输入,并且能实现从测试执行到测试报告生成的自动化。
智能驾驶冒烟测试解决方案
在智驾测试中引入冒烟测试,最大程度上减少了智驾软件测试的测试成本,提高软件开发、软件测试的执行效率。保证软件的质量并降低测试的风险。
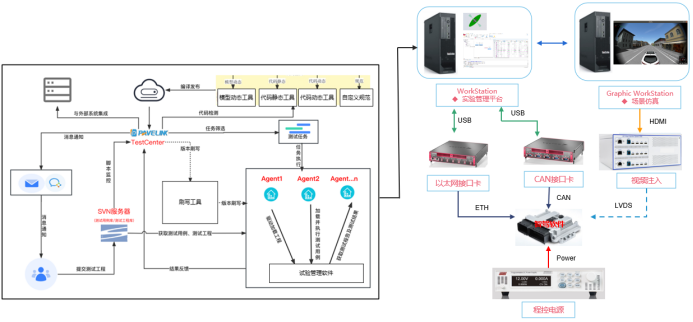
北汇信息提供自主研发的测试管理平台PAVELINK.TestCenter,为冒烟测试提供控制器软件版本管理、软件在线刷写、软件测试任务规划、测试任务执行、测试报告自动发送等功能。
在冒烟测试的解决方案中,控制器与台架的仿真的外围环境构成闭环,通过试验管理软件CANoe管理台架中的电源控制、总线仿真等环境。软件版本更新发布后通过PAVELINK.
TestCenter完成自动化刷写,刷写成功后通过CANoe和vTESTstudio完成自动化冒烟测试计划,最后完成自动化报告回传。冒烟测试结果也可通过邮件或钉钉软件发送至软件开
发及测试人员,以此解决软件版本迭代带来的测试效率不高和软件缺陷发现过晚等测试痛点。测试框架如下:
智能驾驶HiL解决方案
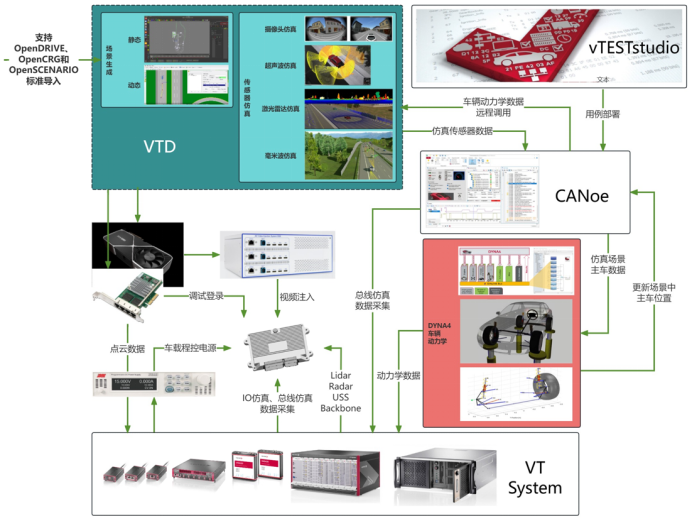
北汇信息基于行业主流的虚拟仿真软件VTD及Vector HiL硬件平台、高性价比的雷达模拟器,提供包含雷达仿真、视频流数据注入、超声波仿真/数据流注入、激光雷达点云仿真
等多种传感仿真手段。结合VT I/O板卡及VN系列总线仿真系统,北汇为HiL测试提供更高精度、操作更加便捷、以及高度集成的自动化测试HiIL解决方案。同时也提供智驾+多自
由度驾驶模拟器、智驾+底盘/座舱/动力等多域HiL解决方案。从而覆盖单智驶域控到跨域控的HiL测试。智驾HiL测试框架如下:
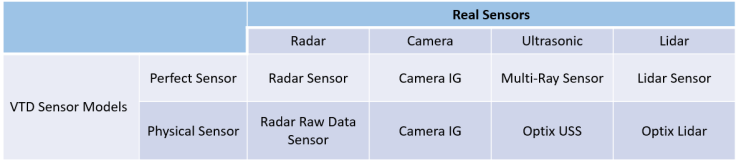
在HiL测试方案中,北汇信息将根据客户不同的测试需求和对象提供多层次的传感器仿真方式,可基于SDK二次开发,提供精确的传感器模型(基于目标信息列表和基于物理的传
感器模型)。
毫米波雷达回波模拟方案
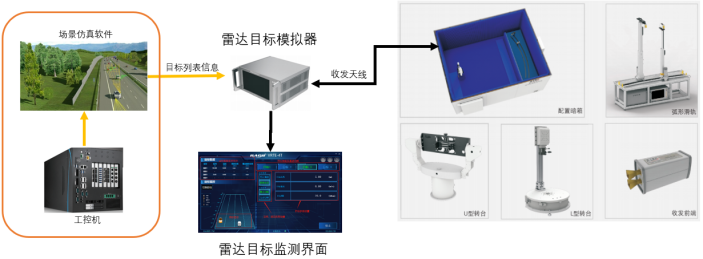
基于北汇合作伙伴的雷达目标模拟器,提供多种组合的雷达回波模拟方案。可提供单方向4目标,双方向8目标,甚至1000点以上目标(基于4d成像雷达)的回波仿真方案。产品
特性:
o可模拟点目标和4d点云目标
o范围:24/60/77/79/92GHz
o距离范围:0~3000m
o速度范围:±720Km/h
o角度范围:可以定制
oRCS动态范围:90db
o可模拟对方来车干扰
o联合基于虚拟场景仿真,实现毫米波雷达在环功能测试(如ACC/AEB)
o可模拟真实路口、汇车、上下坡、十字路口
o可模拟道路场景,如障碍物、限高杆、不同气象条件等
毫米波雷达数据流仿真方案
使用射线追踪方法模拟电磁雷达波的传播,具备全实时仿真功能。产品特性:
o模拟4d毫米波点云
o多路径传播
o重复路径回声
o多普勒频移
o误报仿真
摄像头数据流注入仿真方案
通过视频注入盒将虚拟场景的仿真摄像头数据流转化为智驾域控可识别的视频数据流。以此方式进行图像处理相关智能驾驶应用的测试。这比使用摄像头暗箱方式能提供更真实的
图像来源,适用于多通道摄像头仿真方案。产品特性:
o可支持同时仿真12路摄像头(前视、环视、周视、后视)信号
o单路摄像头最高分辨率大于1080P
o最高帧率不低于60 FPS
o支持摄像头信号颜色空间(RGB、YUV、RAW等)
结合场景仿真软件,可以模拟摄像头故障注入,能够仿真镜头遮挡、裂痕、强弱曝光度、运动模糊等故障场景,可用于符合ISO26262标准的智驾功能安全测试。

超声波雷达仿真方案
根据超声波传感器换能特性来完成超声波回波仿真,可以通过场景仿真软件虚拟的超声波传感器获得障碍物距离和角度信息,通过超声波仿真板卡激励声波换能器产生超声波回波,
真实的超声波探头检测回波后,将超声波回波信息注入给泊车控制器,验证自动泊车/远程泊车/遥控泊车等功能。同时超声波仿真也支持超声波硬线传输协议仿真。超声波回波产
品特性:
o支持12路超声波的仿真
o每一个传感器的超声反射时间都可调
o支持换能器驱动与硬线仿真模式
o频率范围20-100kHz
o模拟距离0-10m范围
o可支持一收一发,一收多发
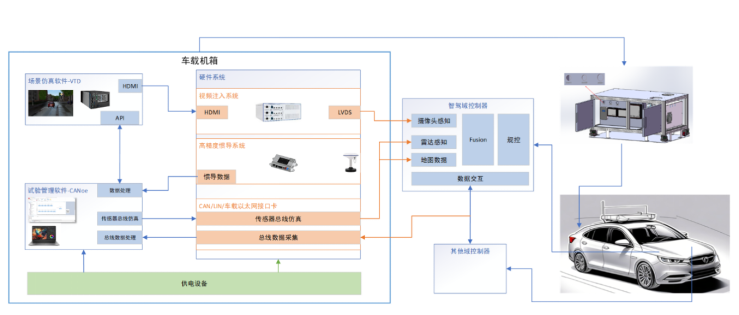
智能驾驶ViL解决方案
在车辆在环测试中,实车提供了真实的整车动力学环境,我们只需使用场景仿真软件模拟车辆周边各种测试场景和交通流即可。北汇信息结合智能驾驶传感仿真技术提供自动泊车、
行车等车辆在环解决方案。
智能驾驶实车测试方案
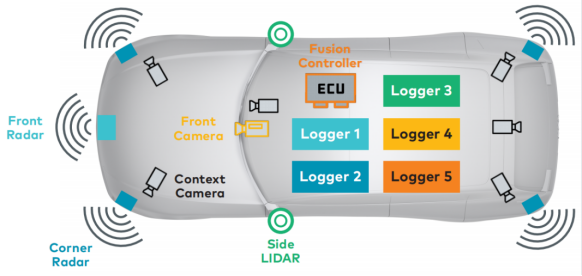
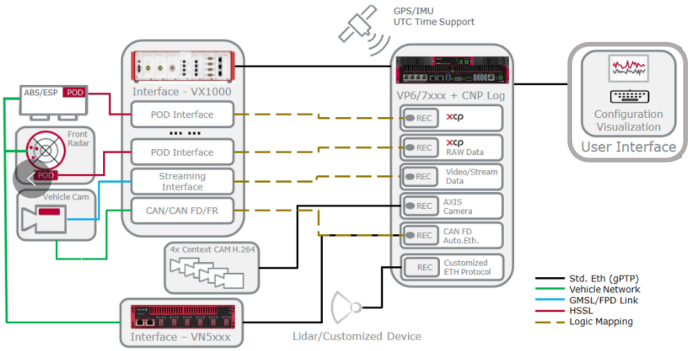
实车路试是智能驾驶车辆研发过程中举足轻重的一环,通过路试能真实评估各个传感系统和自动驾驶功能的性能指标。北汇信息基于Vector的CANape软件、VP系列主机和各类总
线采集设备推出智能驾驶路测数据采集整体解决方案,能同步采集实车运行数据和各种传感器数据。
![]()
![]()
![]()
![]()
![]()
版权 © 2025 上海北汇信息科技有限公司 沪ICP备14018904号-1
